心血管类疾病已经成为威胁人类身体健康的重要疾病之一,而清晰有效的心电图为诊断这类疾病提供了依据,心电采集电路是心电采集仪的 关键部分,心电信号属于微弱信号,其频率范围在0.03~100 Hz之间,幅度在0~5 mV之间,同时心电信号还掺杂有大量的干扰信号,因此,设计良好的滤波电路和选择合适的控制器是得到有效心电信号的关键。基于此,本文设计了以STM32 为控制核心,AD620和OP07为模拟前端的心电采集仪,本设计简单实用,噪声干扰得到了有效抑制。
主控模块电路设计
主控模块的STM32F103VET单片机是控制器的核心,该单片机是ST意法半导体公司生产的32位高性能、低成本和低功耗的增强型单片机,其内核采用 ARM公司最新生产的Cortex—M3架构,最高工作频率72 MHz、512 kB的程序存储空间、64 kB的RAM,8个定时器/计数器、两个看门狗和一个实时时钟RTC,片上集成通信接口有两个I2C、3个SPI、5个USART、一个USB、一个 CAN、一个SDIO,并集成有3个ADC和一个DAc,具有100个I/O端口。
前置放大电路的设计
前置放大电路是模拟信号采集的前端,也是整个电路设计的关键,它不仅要求从人体准确地采集到微弱的心电信号,还要将干扰信号降到最低,由于心电信号属于差分信号,所以电路应采用差动放大的结构,同时要求系统具有高共模抑制比、高输入阻抗、低漂移等特点。因此,选择合适的运算放大器至关重要,这里选择仪用运放 AD620实现前置放大,AD620具有高精度、低噪声、低输入偏置电流低功耗等特点,使之适合ECG监测仪等医疗应用。AD620的放大倍数由1与8脚之间的反馈电阻决定,增益G=49.4 kΩRG+1,由于心电信号中含有较大的直流分量,因此前置放大电路的放大倍数不能过大,在这里选择放大约10倍,因此反馈电阻R6取约5 kΩ,为提高电路的共模抑制能力,这里用一个OP07检测R10,R4上的共模信号驱动导线屏蔽层,消除分布电容。同时用另一个OP07运放和 R5,C3,R7组成右腿驱动电路,在R10,R4上检测到的共模信号经反相放大器后经R7,反馈到人的右腿,进一步抑制了共模信号和50 Hz工频干扰,这里右腿驱动有一个对交流电的反馈通路,交流电的干扰可能对人体产生危害,因此这里要注意做好绝缘措施,同时保护电阻R7尽可能大,取1 MΩ以上。此外系统电源的不稳定也对心电信号的采集有较大影响,因此在本系统中,所有运放的电源脚都并联两个0.1μF和10μF的电容退耦,提高系统的 稳定性,前置放大电路的电路图如图3所示。
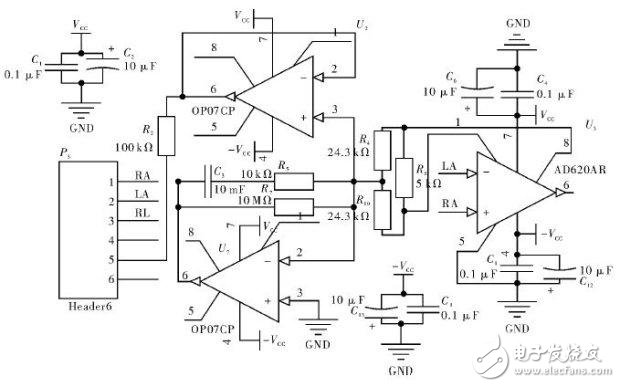
图3 前置放大电路
带通滤波器的设计
从前置放大电路输出的心电信号还含有较大直流分量和肌电信号,基线漂移等干扰成分,所需采集的有用心电信号在0.03~100 Hz范围之间,因此需设计合理的滤波器使该范围内的信号得以充分通过,而该范围以外的信号得到最大限度的衰减,这里采用具有高精度,低偏置,低功耗特点的 两个OP07运放分别组成二阶有源高通滤波器和低通滤波器,高通滤波器由C11,C17,R7,R10组成,截止频率f1≈0.03 Hz,低通滤波器由R8,R9,C10,C13组成,截止频率约为f2≈100 Hz,系统带通滤波器的电路如图4所示。
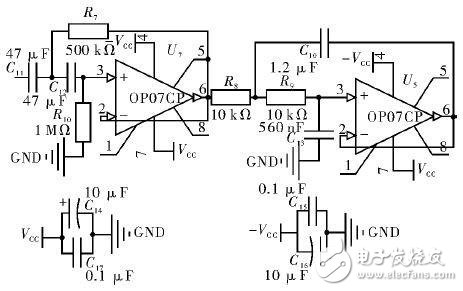
图4 带通滤波器
50 Hz双T陷波器设计
工频是心电信号中最主要也最常见的干扰源,虽然前面的右腿驱动电路对其有一定的抑制作用,但是仍有较大部分进入了后面的电路,因此有必要设计截止频率为50 Hz的带阻电路来进一步滤除干扰,带阻电路也称陷波器,顾名思义,带阻电路就是使某特定频率范围内的信号大幅衰减,而对该频率范围外的信号几乎不产生影 响。双T陷波电路是典型的带阻电路,在双T网络中,两个T型网络的参数是对称的,如图5所示的50 Hz双T陷波电路中,R13=R14=2R16=R=32 kΩ,C20=2C19=2C18=C=200 nF,本质上是由两个T型高通滤波器和低通滤波器并联组成,图5所示电路的截止频率f0=1/2πRC≈50 Hz。
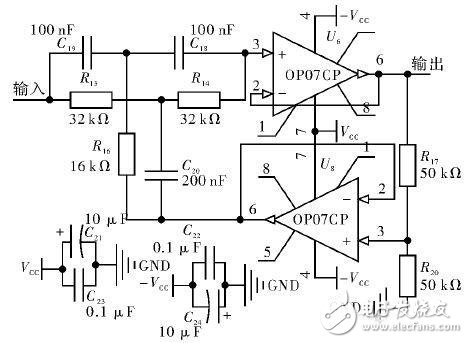
图5 50Hz 带阻滤波器
主放大以及电平抬升电路设计
心电信号的幅度约为0~4 mV,STM32 AD转换的输入电平要求为3.3 V,因此,为了单片机能够处理采集到心电信号,需将采集到的模拟信号放大800~1 000倍。前置放大电路已放大了10倍,理论上主放大电路约放大100倍即可。为确保信号不失真,一般单级放大不超过10倍,因此,可采取两级放大的方式 来达到放大100倍的效果,U9固定放大10倍,U11的反馈电阻采用可调电阻,这样就可以通过变阻器的调节达到放大100的效果。此外,因为STM32 单片机的A/D采集不能采集负电平,因此这里设计了如U7所示的电平抬升电路把心电信号提到0电平以上,方便单片机采集。
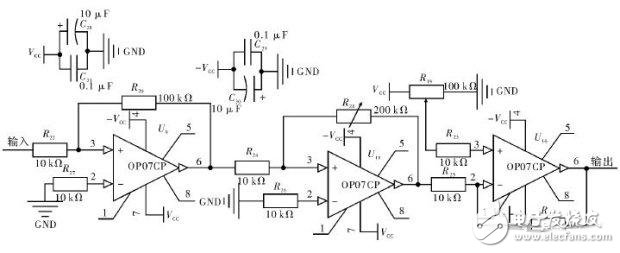
图6 主放大以及电平抬升电路电路
本设计实现的是以STM32为控制核心,以AD620,OP07为模拟信号采集端的小型心电采集仪,该设计所测心电波形基本正常,噪声干扰得到有效抑制,电路性能稳定,基本满足家居监护以及病理分析的要求,整个系统设计简单,成本低廉,具有一定的价值。
在无人机飞行控制系统中,飞行控制器是其核心部件,它负责飞行控制系统信号的采集、控制律的解算、飞机的姿态和速度,以及与地面设备的通讯等工作。随着无人机越来越广泛的应用,它所完成的任务也越来越复杂,对无人机的机动性要求也越来越高,这就要求无人机的控制核心向高集成度和小型化方向发展。本文以586-Engine 嵌入式芯片为核心,设计了某型无人机的飞行控制器。基于AMD Elan SC520处理器的微控制模块,具有高可靠性、结构紧凑以及低功耗等特点,它同时具有功能强大的调试软件。586-Engine的主要参数指标如下:
(1)CPU为32位AMD Elan SC520,主频为133MHz;(2)具有高性能的浮点运算单元,支持正弦、正切、对数等复杂运算,非常适合需要复杂运算的应用。(3)配置512KB的SRAM,512KB的Flash,114字节内部RAM;(4)支持15个外部中断。共有7个定时器,包括一个可编程内部定时器,提供3个16位内部定时器和3个16位GP定时器,再加上一个软件定时器。这些定时器支持外部事件的计时和计数。软件定时器提供微秒级的硬件时间基准。(5)提供32路可编程I/O,2个UART。共有19路12位A/D输入,包括11路ADC串行输入和8路并行ADC,转换频率为300kHz;6路D/A输出,包括2个串行输出DAC和4个输出并行12位DAC,转换频率为200kHz。(6)工作温度为-40℃~80℃,尺寸为91.4mm&TImes;58.4mm&TImes;7.6mm。
飞行控制器硬件设计
该型无人机是为海军野战部队提供通讯中继用途的中型轮式无人机,其飞行控制器是一个单独装箱的小型航空机载电子设备,由DC/DC直流电源变换板、计算机主机板、模拟量通道板、开关量通道板和舵机控制板组成,全部模板通过母板上的总线方式连接,以减小尺寸,提高集成度。
该飞行控制器需要与GPS、磁航向计和无线电高度表等进行通讯,共需5个串口。而586-Engine主板只提供2个串口,分别供地面检测和测控电台使用,因此需要进行串口扩展。串口扩展电路如图3所示。
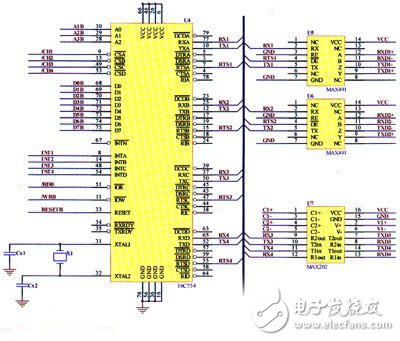
串口扩展电路中采用TL16C754四通道UART并-串转换器件,将8位并行数据转换成4路串行输出,外加MAX202和MAX489电平转换芯片,扩展了2个RS232串口和2个RS422串口,可满足飞行控制器的硬件需求。
D/A转换硬件电路设计
此型无人机采用模拟舵机,共需6路D/A通道产生PWM信号来驱动舵机。586-Engine主板总共提供8路D/A,其中4路12位并行D /A(DA7625)分别控制升降舵机、左右副翼舵机和方向舵机,2路12位串行D/A(LTC1446)控制前轮舵机和油门舵机。由于DA7625的输出电压范围为0~2.5V,LTC1446输出电压范围为0~4.096V,而舵机工作电压为-10~10V,因此需要对信号进行放大和电平平移。D/A 电平平移电路如图所示。
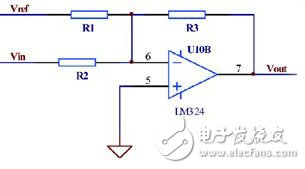
由图可知,D/A电平转换原理是在运放输入端采用加法电路,将输入信号与基准电平比例相加,得到适合采样的电压范围。关于A/D采集,586-Engine主板上自带的19路12位的A/D接口完全满足飞控系统通道数和转换精度的要求,这些A/D接口分别采集气压高度表的数据,无人机机载电压、发动机转速和温度、油门开度等。这些信号发往地面测控计算机,为操作人员对无人机工作状态进行监控提供了基础。关于I/O控制,586-Engine主板上提供了32个16位可编程数字I/O口,用于采集发动机启动信号、伞舱打开信号等,并输出开关量信号控制其它设备,控制无人机起飞与回收过程。
电源模块硬件电路设计
飞行控制器的电源模块电路给飞行控制器提供干净稳定的供电电压,用来保证飞行控制器正常工作。电源模块电路的设计好坏直接影响飞行控制器运行的稳定性和可靠性。该型无人机由于对尺寸有一定的要求,同时考虑到可靠性与成本,因此在设计时选用了成熟的标准模块电源,外接少量器件即可工作。飞行控制器供电模块电路如图5所示。
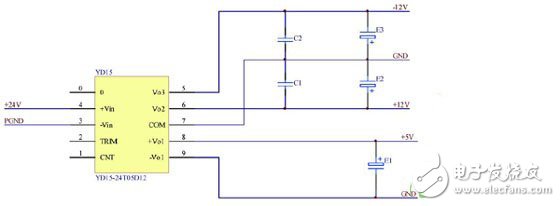
其中,采用24T05D12模块电源作为供电电路的主芯片,提供的功率为30W,输入电压范围为18V~36V,具有三路电源输出:+5V和±12V,为机载传感器和舵机进行供电。嵌入式芯片的使用,减小了飞行控制器的体积与重量,实现了飞行控制器小型化、高集成度的设计目标;自行设计的串口扩展电路、舵机控制板等降低了研制成本,满足了项目需求方的要求。可以预见,586-Engine特有的功能以及较高的性价比将在无人机飞行控制领域得到广泛的应用。




















