目前最常用的现场总线为CAN总线,CAN总线以可靠性高、成本低、应用灵活等诸多优点,已广泛应用于智能通信网络中,但收发器驱动能力的限制不适合远距离数据传输及远程控制。而以太网技术成熟、通信速度快、软硬件产品丰富和外围技术支持全面,可以利用网络进行远距离通信,但在工业控制中仍然存在部分问题尚未解决。结合CAN总线与以太网自身的优缺点,本文研究了适用于船舶监控系统基于双CAN总线与以太网的现场监控模块,该模块可安装于配电开关柜内,能够就近进行电流、电压及开关状态信息的采集,独立进行数据处理,实现测量、保护、控制等功能。能够通过冗余双CAN总线与其他智能节点进行通信,并且通过以太网上传重要数据给监控台,协助监控台完成监测和控制功能。作为配电网络与监控网络连接的纽带,具有很好的开发应用前景。
现场监控模块的硬件系统
在现场监控模块中,大量的现场实时数据需要采集和处理,并及时、迅速地向集中监控台传输,即向集中监控台提供整个控制过程的具体数据,同时还要完成判断处理并通过输出模块发送各种控制命令,考虑到其功能复杂程度,采用了DSP+FPGA双控制器的硬件方案,其硬件结构原理参见图1。
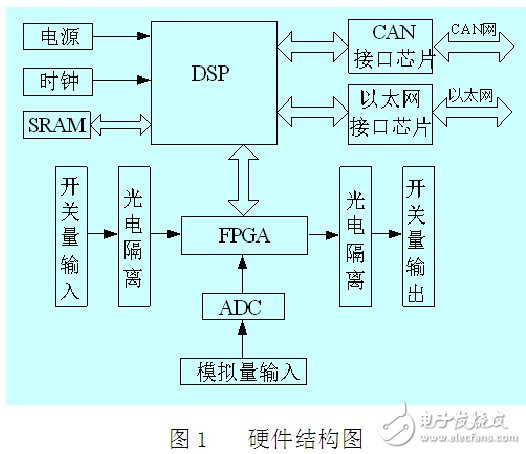
1) A/D芯片 该系统采用AD7865作为A/D芯片,该芯片为高速14位A/D转换器,同时采样4个输入通道,并具有4个采样、保持放大器。其优点在于能够真正实现多路信号的同步采样,并保持各通道信号的相位关系。具有片内时钟、读写允许逻辑、多种通道选择方式以及内部精确的2.5V参考电压,使得其与高速处理器的接口变得非常简单。本系统共配置了4片AD7865,能同步采样多达16路模拟量数据。
2) 电磁隔离 所有开关量的输入输出均采用电磁隔离技术,可有效提高抗干扰能力,本系统选择了16片4路集成电磁隔离芯片ADUM1410,使得该模块能同时完成多达32输入,32路输出的数据采集。
3) FPGA 该系统以EP1C6PQ240作为系统的辅控制芯片,该芯片有5980个逻辑单元,嵌入式存储块有一列M4K块,每个M4K块可以组成各种存储器,包括双端口、单端口RAM、ROM和FIFO等,I/O单元包含一个双向I/O缓冲器和三个寄存器,具有2个锁相环和8个独立系统时钟,芯片管脚数为240个, 可用管脚数为185个。FPGA主要完成数据输入输出控制及数据预处理功能。所有的开关量信号送入FPGA,所有的模拟量信号经A/D芯片转换为数字信号后也送入FPGA,FPGA需要向A/D芯片提供控制信号来控制A/D芯片的读写,所有的数据由FPGA预处理后供DSP读取。
4) DSP 该系统以TMS320LF28335作为主控制芯片[4~5],该芯片为低功耗、高性能的32位芯片,其内部集成了多种功能模块,不但包括多种通信接口, 且同一种通信接口的数量不止一个,如SCI串口有3个,CAN口有2个,只需增加简单的外围器件即可实现扩展功能。DSP主要完成数据处理、逻辑控制及通讯功能。由于FPGA已将大量数据做了预处理,且本系统中DSP与FPGA的16位地址线和16位数据线均相连,采用并行数据传输,DSP只要通过简单的指令即可快速读取所需要的开关量和模拟量值,为状态监控及故障诊断功能提供基础。
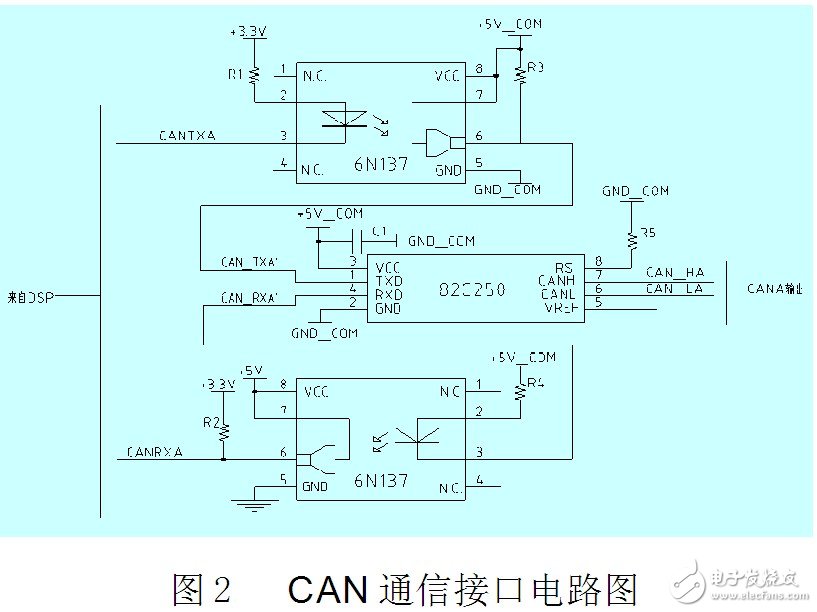
5) CAN通信 大多数嵌有CAN控制器的控制芯片只有一个CAN控制器,如果希望系统具有双CAN接口,则需要外接一个CAN控制芯片,增加了硬件成本,电路结构更复杂。
而本系统使用的DSP芯片中嵌有两个CAN控制器,因此只要将两个CAN控制器分别外接CAN驱动器就可以实现与两条独立的CAN总线连接。图2以 CANA为例显示了TMS320LF28335的CAN通信接口电路,CANB的电路设计与此相同。CAN总线收发器82C250是驱动CAN控制器和物理总线间的接口,提供对总线的差动发送和接收功能。利用高速光耦6N137,实现收发信号的隔离和DSP与82C250之间的电平匹配。
6) 以太网通信 本系统选用了W5100作为以太网接入芯片。W5100包含了TCP/IP、UDP等网络协议和DLC、MAC以太网协议。它提供多种总线,包括两种并行总线以及SPI串行总线等接口方式。内置16KB数据缓冲双口RAM,可快速进行数据交换。图3为以太网通信接口电路图。
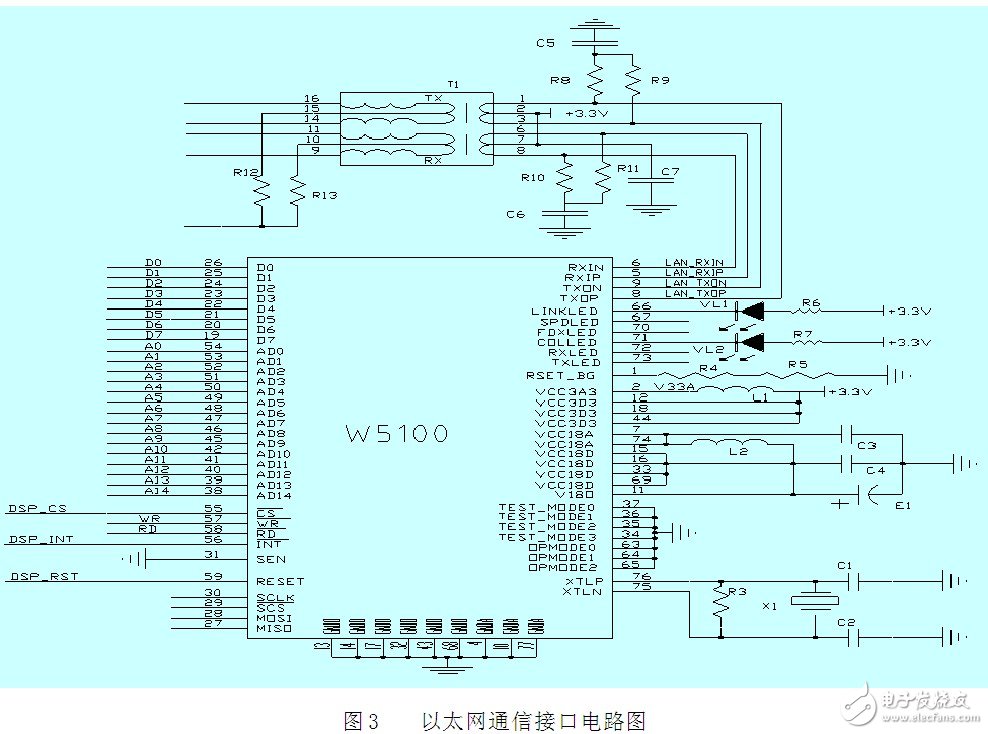
W5100供电电压为3.3V和1.8V,其中1.8V可由芯片内部线性稳压电源产生,外接滤波电路后供回芯片。L1、L2均为1μH的电感,C3、C4均为0.1μF的电容。根据 W5100的工作频率要求,需在XTLP和XTLN引脚间接25MHz晶振及接地电容C1和C2,均为22pF。W5100的内部模拟电路需要在 RSET_BG引脚与地之间外接精度为1%的电阻R4和R5,阻值分别为12k和300Ω。为了实现电气隔离,消除部分谐波(根据结构的不同可以消除不同次的谐波),有效降低零地电压,需要在W5100与外部接口之间接网络变压器。本系统网络变压器选11FB-05NL,网络变压器的RXPI与RXIN、 TXOP与TXON各需要2个51Ω(精度为1%)的电阻和1个0.1μF的电容与特定端相连。DSP通过片选信号DSP_CS选中W5100芯片,通过直接总线模式读(/WR)、写(/RD)信号和数据(DATA)、地址(ADDR)总线可以简单的将W5100看做一个外部存储器来实施控制。
设计了现场监控模块可应用于船舶配电网络中的开关柜或重要设备,配电单元内所有电压、电流、开关状态量等利用现场监控模块就地采集及处理,节省了大量电缆,减轻了集中监控台的控制负担,双冗余CAN及以太网等通信接口,使其与集中监控台的通信变得便利而可靠,为整个监控系统采取灵活而简便的网络拓扑结构提供基础,具有广泛的应用前景。
随着信息化、智能化、网络化的发展,嵌入式系统技术获得广阔的发展空间,工业控制领域也进行着一场巨大的变革,以32位高端处理器为平台的实时嵌入式软硬件技术将应用在工业控制的各个角落。嵌入控制器因其体积小、可靠性高、功能强、灵活方便等许多优点,其应用已深入到工业、农业、教育、国防、科研以及日常生活等各个领域,对各行各业的技术改造、产品更新换代、加速自动化化 进程、提高生产率等方面起到了极其重要的推动作用。
障碍物距离检测电路的设计
在本系统中超声波测距电路是由MICROCHIP的PIC16C57设计而成的,选用的超声波传感器是T/R40-16压电陶瓷传感器。在工作中,主控器PIC16C57发出信号使发射端的超声波换能器发出加以电压激励,其受激励后以脉冲的形式发射超声波,当超声波接收器接收到回波信号时,传回到主控器中,从脉冲信号开始发射时主控器中的定时器便开始计时,接收到回波信号时停止计时。所侧出的时间间隔再乘以声速就得到了两倍的距离值。从而计算出障碍物到发射点的距离。其电路图如图2所示。
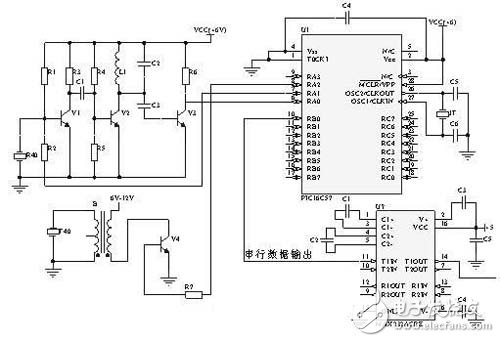
图2 超声波测距电路图
距离值通过PIC16C57的10脚进行串行输出,经MAX232芯片后与ARM的串口相连。芯片MAX232是为RS232标准串口设计的接口电路,它完成TTL电平和RS232电平的转换。
声光报警电路设计
本系统要求根据影响装载机稳定性的障碍物距离的临界值对危险状况进行三级报警。当处于低危险状况时,只有指示灯绿灯被点亮,提醒驾驶者注意;当危险级别增高时,指示灯黄灯点亮,同时伴随有舒缓的蜂鸣声,提醒驾驶者采取措施;当达到最高危险级别时,指示灯红灯被点亮,同时蜂鸣声由舒缓转为急促,提醒驾驶者赶紧制动。设计中,分别采用了LPC2290的P2.20(GPIOA4)驱动绿色LED,P2.21(GPIOA5)驱动黄色LED, P2.22(GPIOA6)驱动红色LED,P2.23(GPIOA7)驱动蜂鸣器。所设计的报警电路如图3所示。
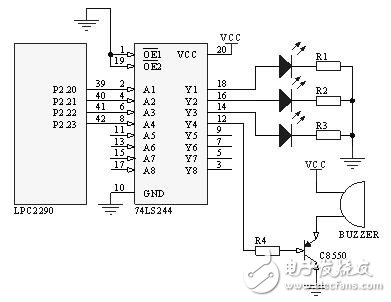
图3 报警电路
通过试验验证,该系统已完成了所需的功能要求,最大测量值为9.99m,误差 ≤0.01m。安装非常方便,便于使用。但该系统还有一个不足,即用超声波传感器检测车辆前方路面信息时,如果是凸起的障碍物能有效的检测到,但当前方为凹坑时便检测不出来,所以有待于进一步研究。


















